Introduction to Surrogate Road Safety
Surrogate safety measures have been used since the late 1960’s to analyze road safety. Since then, there have been many advancements in the methodology and technology used. Due to the advantages of using surrogate safety methods, it is the foundation for the video-based analysis we offer at Transoft Solutions.
Traditionally, road safety analysis uses collision data to determine collision probability, but there are several disadvantages to this method:
- Studying collision data is reactive. Safety evaluation depends on collisions occurring to evaluate the level of safety, making it nearly impossible to achieve the goal of zero traffic deaths and serious injury collisions. We don’t do this with other aspects of public health. For example, we don’t wait until after someone has had a heart attack to tell them to exercise more or change their diet. By then it is often too late. Instead, doctors look at surrogate indicators, such as cholesterol to monitor heart health and prevent fatal events from occurring in the future.
- The infrequent nature of traffic collisions means that often five to ten years of crash data is required for the number of collisions to reach statistical significance, during which time intersection configurations and road user patterns may change significantly.
- Traffic crashes and injuries are under-reported in many localities, making collision data incomplete and sometimes unreliable.
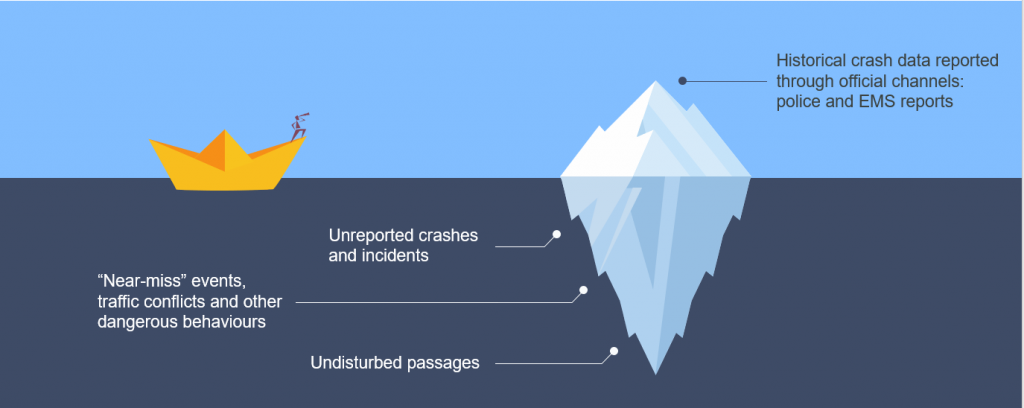
For these reasons, many road safety practitioners have been turning to surrogate safety methods. Surrogate safety analysis techniques attempt to shortcut the data collection cycle by identifying specific surrogate indicators that are highly correlated to risk of collisions and occur much more frequently than crashes but might otherwise not be reported through the traditional channels. In contrast to collision studies, which require many years of data, surrogate safety studies only require 30-60 hours of video footage from almost any kind of camera, making it a time and cost-effective method.
The general principle behind surrogate safety methods
Road user interactions follow a hierarchy ranging from undisturbed passages (no interaction or proximity whatsoever) all the way up to fatal crashes. This is illustrated in Hydén’s4 pyramid below:
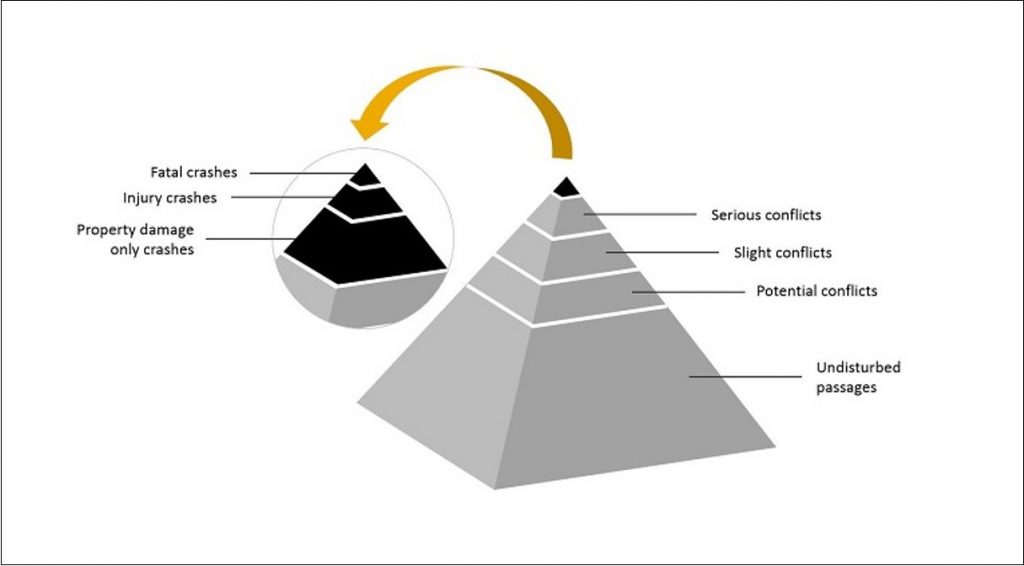
This allows for the indirect observation of collisions by studying interactions that are considered to be collision precursors. By studying interactions in the categories of slight, potential conflicts, and undisturbed passages, we can collect information that allows us to approximate how serious and fatal collisions are likely to occur.
The origin of conflict analysis
While safety analysis using surrogate methods has gained popularity in recent years, its earliest form originated in the 1960’s and was developed by General Motors9. The simple definition of a conflict was: “Discrete, observable events involving two or more road users, in which the action of one road user causes the other road user to make an evasive maneuver to avoid a collision.”8 Throughout the 1970s and 1980s similar methods were then developed in England2, 10, Israel1, Sweden4, the United States8, Canada7 and elsewhere. However, the early methods used in-field visual observations, which presented issues like subjectivity, reproducibility, and non-transferability. Over the years, advances in technology and conflict analysis methodology have evolved to allow for more uniform and precise estimates.
Modern methods
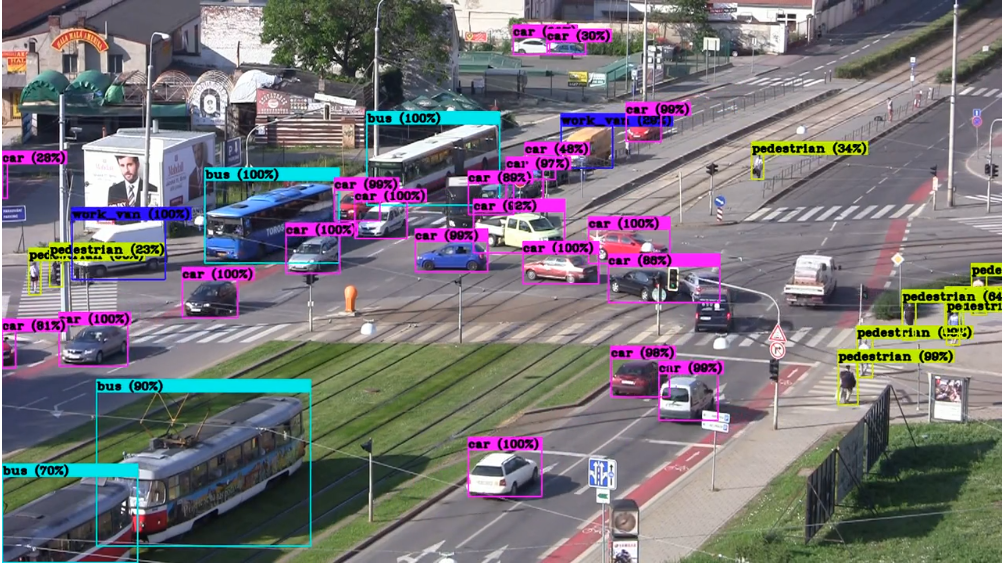
Today, technology has allowed for use of surrogate safety analysis methods that are more transferable. Computer vision allows us to monitor and measure the displacements of ALL road users within a traffic scene to a high degree of precision, in an affordable, repeatable, and unobtrusive way, without the challenges of human fatigue and bias. The following image shows how computer vision is applied to detect, classify, and track multiple road user types in a typical traffic scene.
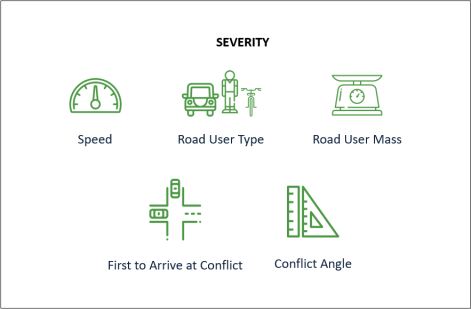
Using video collected from almost any traffic or video camera, practitioners can apply objective measures of safety indicators which measure both the probability (likelihood of a collision), as well as the expected severity of a collision. The most common and notable measures of collision probability are Post-Encroachment Time (PET) and Time-to-Collision (TTC), as they directly measure the amount of time road users allow themselves to avoid potential interactions. Other measures of collision probability include Deceleration to Safety Time 3, Proportion of Stopping Distance5, and Deceleration Rate to Avoid Crash6. The below image highlights how Transoft’s TrafxSAFE suite of solutions measures collision risk using PET to estimate the probability of a collision, as well as a combination of speed, road user classification, mass, first to arrive, and conflict angle to gauge collision severity.
The value of good data
Crash data is important, but does it tell the full story of what is happening today? Understanding risk exposure is the key to prioritizing road safety improvements for all motorists and vulnerable road users. Transoft’s video-based road safety solutions helps practitioners take a granular, more proactive approach to identifying and evaluating safety concerns. By focusing on serious conflicts, we can make the most of our resources to prevent collisions from happening.
Resources
- Hakkert, “Review of Traffic Conflict Technique Applications in Israel,” in International Calibration Study of Traffic Conflict Techniques. Springer, 1984, pp. 7–16.
- Spicer, “A study of traffic conflicts at six intersections,” Transport and Road Research Laboratory, Crowthorne, Berkshire, UK, Tech. Rep. TRRL Report LR551, 1973.
- Hupfer, “Deceleration to Safety Time (DST) – a Useful Figure to Evaluate Traffic Safety.” Lund, Sweden: Department of Traffic Planning and Engineering, 1997, first use of DST.
- Hyd n, “The Development of a Method for Traffic Safety Evaluation: The Swedish Traffic Conflicts Technique,” Ph.D. dissertation, Department of Traffic Planning and Engineering, 1987, tCT thresholds, conversion rates, and reliability tests.
- Gettman and L. Head, “Surrogate Safety Measures From Traffic Simulation Models,” p.118, 2003.
- Guido, F. Saccomanno, A. Vitale, V. Astarita, and D. Festa, “Comparing Safety Performance Measures Obtained from Video Capture Data,” Journal of Transportation Engineering, vol. 137, no. 7, pp. 481–491, jul 2011. [Online]. Available:http://dx.doi.org/10.1061/(ASCE)TE.1943-5436.0000230
- R. Brown, “Traffic conflicts for road user safety studies,” Canadian Journal of Civil Engineering, vol. 21, no. 1, pp. 1–15, feb 1994. [Online]. Available: http://dx.doi.org/10.1139/l94-001
- Parker and C. Zegeer, “Traffic Conflict Techniques for Safety and Operations – Observers’ Manual,” p. 36, 1989.
- Perkins and J. Harris, “Traffic conflicts characteristics: Accident potential at intersections,” Highway Research Record, vol. 225, pp. 35–43, 1968.